
2015-Visual odometry algorithm using an RGB-D sensor and IMU in a highly dynamic environment
- 本文使用IMU来判别动态特特征点
- 不符合主流移动趋势的点判别为动态点
- 没有IMU的动态环境下的数据集
Abstract
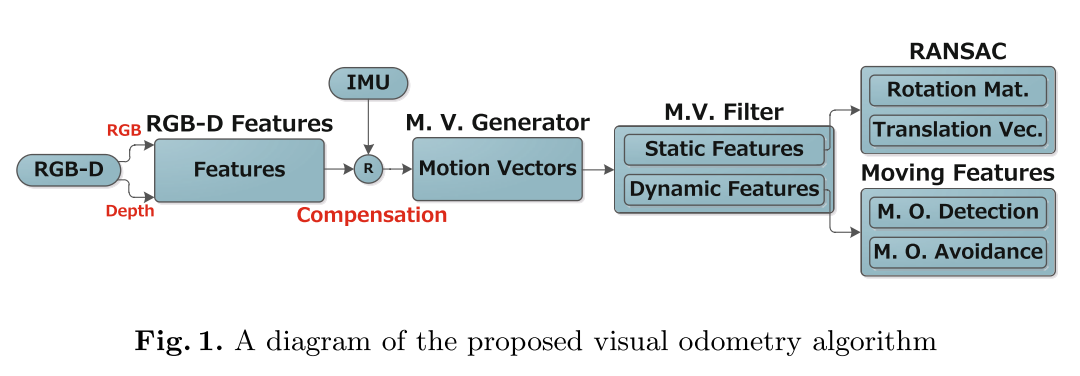
This paper proposes a robust visual odometry algorithm us- ing a Kinect-style RGB-D sensor and inertial measurement unit (IMU) in a highly dynamic environment. Based on SURF (Speed Up Robust Fea- tures) descriptor, the proposed algorithm generates 3-D feature points incorporating depth information into RGB color information. By using an IMU, the generated 3-D feature points are rotated in order to have the same rigid body rotation component between two consecutive im- ages. Before calculating the rigid body transformation matrix between the successive images from the RGB-D sensor, the generated 3-D feature points are filtered into dynamic or static feature points using motion vectors. Using the static feature points, the rigid body transformation matrix is finally computed by RANSAC (RANdom SAmple Consensus) algorithm.
In this paper, it is assumed that the motion vectors showing different tendencies with the RGB-D sensor are generated by moving objects or noise.
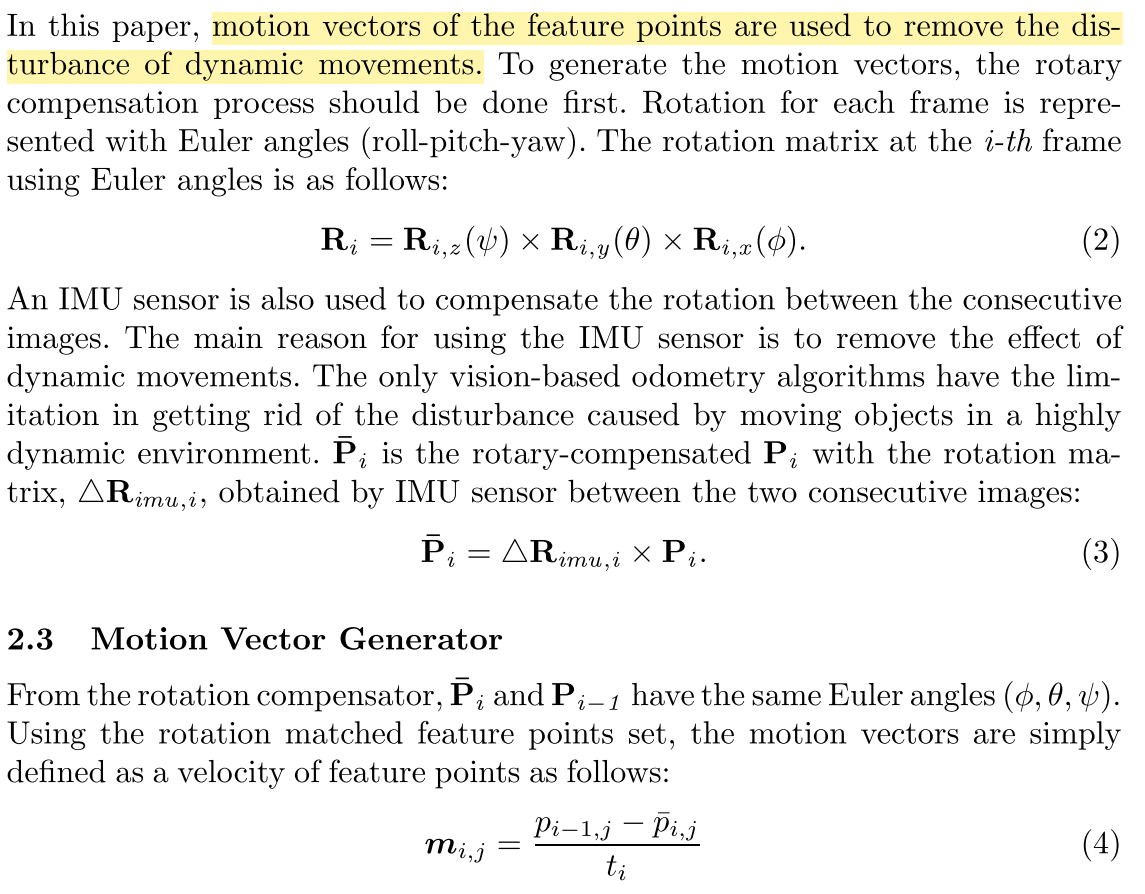
Motion vectors of the feature points are used to remove the dis-turbance of dynamic movements.

![How to compile and run ORB-SLAM3? [ORB-SLAM3 运行示例]](https://raw.githubusercontent.com/yubaoliu/assets/e8b300824d2a6a444c520ef2b54c1bce05335860/ORBSLAM3_main_system.png)
![RGB-D SLAM in Dynamic Environments Using Static Point Weighting [Reading Seminar]](https://img.youtube.com/vi/sK3QzUooBrc/mqdefault.jpg)



