
G2O: fatal error: g2o/core/base_vertex.h: No such file or directory
## fatal error: g2o/core/base_vertex.h: No such file or directory
Read more »codecogs: Latex Editor
 https://www.codecogs.com/latex/eqneditor.php ## Html ```html ```
Read more »
Ceres: Using Ceres with CMake
## Using Ceres with CMake ```cmake cmake_minimum_required(VERSION 2.8) project(helloworld) find_package(Ceres REQUIRED) include_directo...
Read more »
Ceres: fatal error: ceres/ceres.h: No such file or directory
## fatal error: ceres/ceres.h: No such file or directory
Read more »
OpenCV: error: ‘CV_GRAY2BGR’ was not declared in this scope
## error: ‘CV_GRAY2BGR’ was not declared in this scope ```sh /home/yubao/data/project/slambook2/VO_Direct/direct_method.cpp: In functi...
Read more »
Eigen: 如何在Cmake 工程中使用Eigen3 ?
## How to use in Cmake ```sh cmake_minimum_required (VERSION 3.0) project (myproject) find_package (Eigen3 3.3 REQUIRED NO_MODULE) ad...
Read more »
Sophus: Sophus如何在CMake中使用?
## Sophus C++ implementation of Lie Groups using Eigen: https://strasdat.github.io/Sophus/
Read more »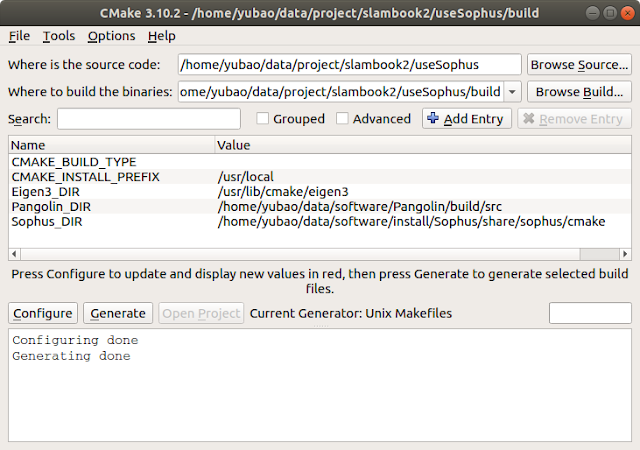
Sophus问题: Sophus_INCLUDE_DIRS 为空, Sophus头文件与库文件找不到的问题
# fatal error: sophus/se3.hpp: No such file or directory ```sh fatal error: sophus/se3.hpp: No such file or directory #include ...
Read more »
CMake: How to determine debug or release mode
## How to determine debug or release mode ## 问题: CMake 中如何根据不同的编译模式来执行相应的操作? CMake: How to determine debug or release mode
Read more »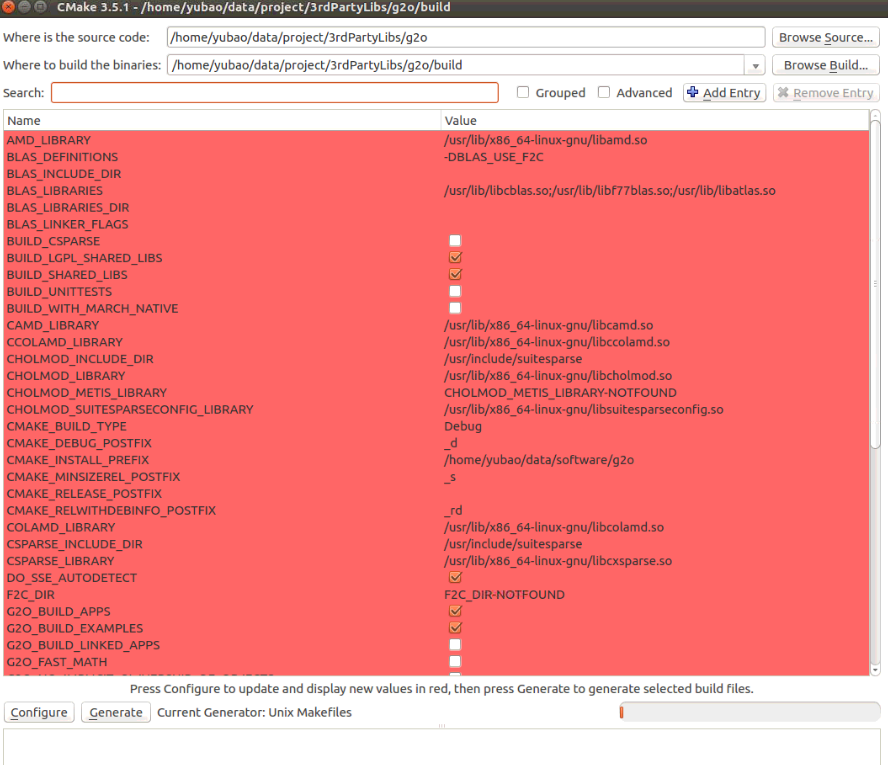
G2O Installation (G2O安装)
# Overview - How to install G2O? - Github: https://github.com/RainerKuemmerle/g2o.git --- G2O 是一个数学优化工具,可以用G2O来做线性优化,非线性优化。在SLAM中经常会用到。 ...
Read more »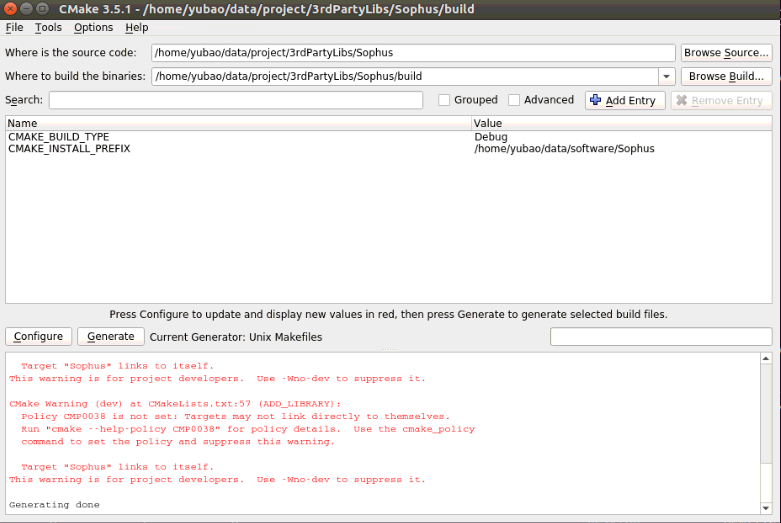
Sophus: 非模板版本安装 Sophus Installation for old version
# Overview - API: https://strasdat.github.io/Sophus/index.html - Github: https://github.com/strasdat/Sophus - [stevenlovegrove/Sophus](...
Read more »
Conversion Between ROS imgmsg and OpenCV: cv_bridge Example (Python)
# Synopsis - 如何在OpenCV与ROS图像消息之间进行转换 - [Converting between ROS images and OpenCV images (Python)](http://wiki.ros.org/cv_bridge/Tut...
Read more »
python: TypeError: not enough arguments for format string
TypeError: not enough arguments for format string
Read more »
Getting started with ROS and Docker
## Synopsis - Pulling ROS Images - Running ROS containers - Start multiple terminals on the same container - Start multiple terminals on...
Read more »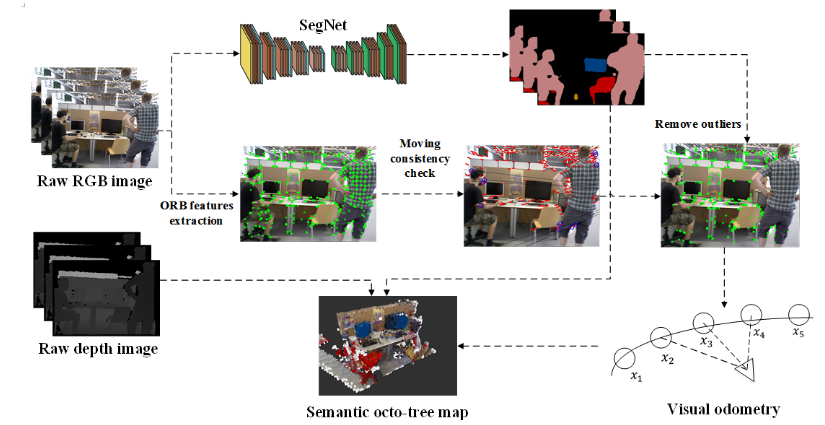
DS-SLAM
## Overview - [Official Github](https://github.com/ivipsourcecode/DS-SLAM.git) - [My forked Source Code](https://github.com/yubaoliu/DS-SLA...
Read more »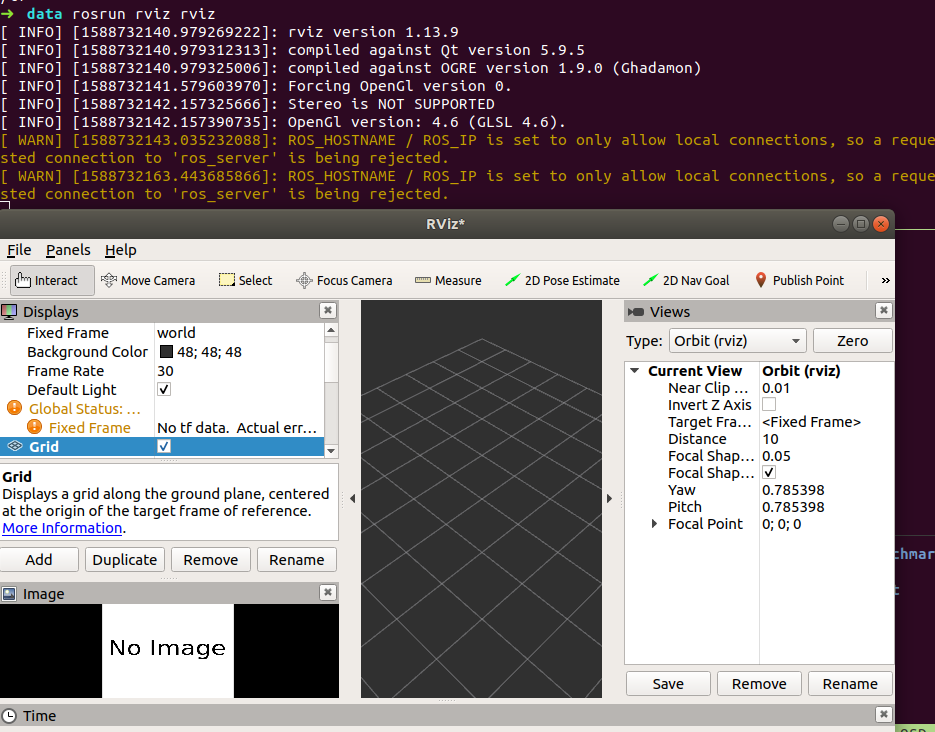
ROS Remote Debgging and Communication (如何远程调试ROS程序)
# Synoposis - Remote connect to remote PC - Remote connect to ROS server in docker - Test using dataset 如何远程调试ROS程序? # Remote connect t...
Read more »
Docker: stderr: nvidia-container-cli: requirement error: unsatisfied condition: cuda
## Error Message ```sh ERROR: for aivslam Cannot start service aivslam: OCI runtime create failed: container_linux.go:345: starting conta...
Read more »
Google Voice 使用方法
## Google Voice 使用方法 - Google Voice 注册 - Google Voice 注册Wechat Out - Google Voice 注册脸书
Read more »
ROS Installation (ROS安装与运行)
## Synoposis - Install ROS, refer http://wiki.ros.org/ROS/Installation - Install ROS within docker
Read more »
How to install Ruby
# Synoposis - Install ruby from source code - Install ruby using rbenv - Install ruby in docker - Check ruby version # Intruduction ROS, ...
Read more »
How to Use DynaSLAM using Docker? DynaSLAM安装与运行
DynaSLAM:动态场景中的追踪、建图和修复 ## Overview - Build DynaSLAM Docker image - Start DynaSLAM from Docker container ## Demo - [DynaSLAM安装与运行](htt...
Read more »
Docker Installation and configuration (Docker 安装与配置)
## Outline - Docker installation - Nvidia-docker installation - Docker content management ## Docker Installation 1. Prepare: Ubuntu 16/18...
Read more »
Subscribe to:
Posts
(
Atom
)



