
 ## Demo
## Build
### Environment
```sh
Ubuntu 16.04
ROS Kinetic
Cuda 10.0
Cudnn 7
Caffe (SegNet)
Eigen 3
OpenCV 3
[optional] docker: 19.03.12
```
### Add to ROS PACKAGEPATH
```sh
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$HOME/catkin_ws/src/DS-SLAM/Examples/ROS/ORB_SLAM2_PointMap_SegNetM
```
### Build and install caffe-segnet-cudnn5
```sh
git clone https://github.com/yubaoliu/caffe-segnet.git
cd SegNet/caffe-segnet
mkdir build
cd build
cmake .. -CMAKE_INSTALL_PREFIX=/usr/local
make & make install
```
### Build DS-SLAM
```sh
bash DS_SLAM_BUILD.sh
```
## Obtain Caffe model
```sh
http://mi.eng.cam.ac.uk/~agk34/resources/SegNet/segnet_pascal.caffemodel
```
## Run Demo
Please customize the directory path of dataset and caffe model before run the launch file.
```sh
roslaunch DS_SLAM_TUM3.launch
```
## Demo
## Build
### Environment
```sh
Ubuntu 16.04
ROS Kinetic
Cuda 10.0
Cudnn 7
Caffe (SegNet)
Eigen 3
OpenCV 3
[optional] docker: 19.03.12
```
### Add to ROS PACKAGEPATH
```sh
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$HOME/catkin_ws/src/DS-SLAM/Examples/ROS/ORB_SLAM2_PointMap_SegNetM
```
### Build and install caffe-segnet-cudnn5
```sh
git clone https://github.com/yubaoliu/caffe-segnet.git
cd SegNet/caffe-segnet
mkdir build
cd build
cmake .. -CMAKE_INSTALL_PREFIX=/usr/local
make & make install
```
### Build DS-SLAM
```sh
bash DS_SLAM_BUILD.sh
```
## Obtain Caffe model
```sh
http://mi.eng.cam.ac.uk/~agk34/resources/SegNet/segnet_pascal.caffemodel
```
## Run Demo
Please customize the directory path of dataset and caffe model before run the launch file.
```sh
roslaunch DS_SLAM_TUM3.launch
```
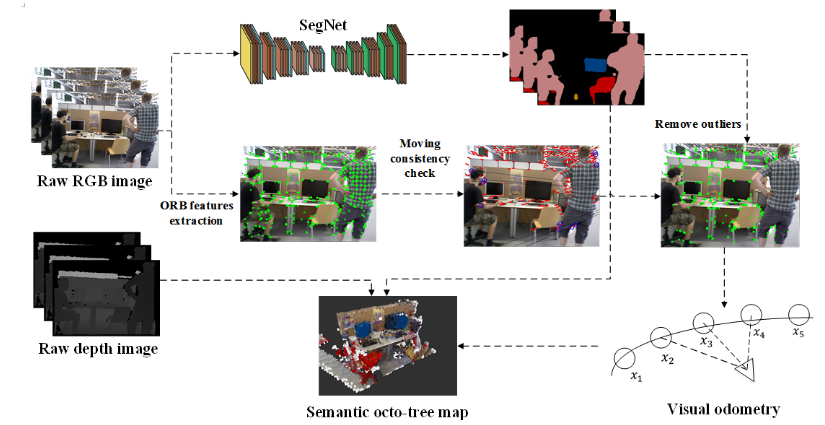
DS-SLAM
## Overview
- [Official Github](https://github.com/ivipsourcecode/DS-SLAM.git)
- [My forked Source Code](https://github.com/yubaoliu/DS-SLAM.git)
## Paper
Yu, C., Liu, Z., Liu, X. J., Xie, F., Yang, Y., Wei, Q., & Fei, Q. (2018). DS-SLAM: A Semantic Visual SLAM towards Dynamic Environments. IEEE International Conference on Intelligent Robots and Systems, 1168–1174. https://doi.org/10.1109/IROS.2018.8593691
## Demo
## Build
### Environment
```sh
Ubuntu 16.04
ROS Kinetic
Cuda 10.0
Cudnn 7
Caffe (SegNet)
Eigen 3
OpenCV 3
[optional] docker: 19.03.12
```
### Add to ROS PACKAGEPATH
```sh
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$HOME/catkin_ws/src/DS-SLAM/Examples/ROS/ORB_SLAM2_PointMap_SegNetM
```
### Build and install caffe-segnet-cudnn5
```sh
git clone https://github.com/yubaoliu/caffe-segnet.git
cd SegNet/caffe-segnet
mkdir build
cd build
cmake .. -CMAKE_INSTALL_PREFIX=/usr/local
make & make install
```
### Build DS-SLAM
```sh
bash DS_SLAM_BUILD.sh
```
## Obtain Caffe model
```sh
http://mi.eng.cam.ac.uk/~agk34/resources/SegNet/segnet_pascal.caffemodel
```
## Run Demo
Please customize the directory path of dataset and caffe model before run the launch file.
```sh
roslaunch DS_SLAM_TUM3.launch
```
## Demo
## Build
### Environment
```sh
Ubuntu 16.04
ROS Kinetic
Cuda 10.0
Cudnn 7
Caffe (SegNet)
Eigen 3
OpenCV 3
[optional] docker: 19.03.12
```
### Add to ROS PACKAGEPATH
```sh
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$HOME/catkin_ws/src/DS-SLAM/Examples/ROS/ORB_SLAM2_PointMap_SegNetM
```
### Build and install caffe-segnet-cudnn5
```sh
git clone https://github.com/yubaoliu/caffe-segnet.git
cd SegNet/caffe-segnet
mkdir build
cd build
cmake .. -CMAKE_INSTALL_PREFIX=/usr/local
make & make install
```
### Build DS-SLAM
```sh
bash DS_SLAM_BUILD.sh
```
## Obtain Caffe model
```sh
http://mi.eng.cam.ac.uk/~agk34/resources/SegNet/segnet_pascal.caffemodel
```
## Run Demo
Please customize the directory path of dataset and caffe model before run the launch file.
```sh
roslaunch DS_SLAM_TUM3.launch
```




No comments