
 # Run test_settings.launch
- Modify test_settings.launch:
```sh
# Run test_settings.launch
- Modify test_settings.launch:
```sh
RGBD SLAMv2: build and run 环境搭建与运行
# Objective
- Build development environment
- Build RGBD SLAM v2
- Run RGBD SLAMv2 use TUM dataset
# Environment
- Host: Ubuntu18
- Docker: 19.03
- Docker-compose: 1.25
- Docker image: ubuntu 16 + cuda 9 + ROS kinetic
```sh
➜ launch git:(dev) ✗ docker --version
Docker version 19.03.11, build 42e35e61f3
➜ launch git:(dev) ✗ docker-compose --version
docker-compose version 1.25.5, build 8a1c60f6
```
Host:
```sh
➜ launch git:(dev) ✗ nvidia-smi
Thu Jun 11 10:52:57 2020
+-----------------------------------------------------------------------------+
| NVIDIA-SMI 440.82 Driver Version: 440.82 CUDA Version: 10.2 |
|-------------------------------+----------------------+----------------------+
| GPU Name Persistence-M| Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap| Memory-Usage | GPU-Util Compute M. |
|===============================+======================+======================|
| 0 GeForce GTX 166... Off | 00000000:01:00.0 Off | N/A |
| N/A 44C P8 4W / N/A | 720MiB / 5944MiB | 5% Default |
+-------------------------------+----------------------+----------------------+
```
Docker:
```sh
# cat /usr/local/cuda/version.txt
CUDA Version 9.0.176
# nvcc --version
nvcc: NVIDIA (R) Cuda compiler driver
Copyright (c) 2005-2017 NVIDIA Corporation
Built on Fri_Sep__1_21:08:03_CDT_2017
Cuda compilation tools, release 9.0, V9.0.176
```
# Build RGBD SLAMv2
See install.sh
Modify:
where your source code want to install:
- SUBDIR=~/rgbdSLAM
```sh
./install.sh
```
# Build RGBD SLAMv2 Manually
I build it manually use docker. Please check ``docker/Dockerfile" and "docker/entrypoint.sh".
The program is build automatically when start docker firstly.
- G2O
```sh
git clone -b c++03 https://github.com/felixendres/g2o.git /root/g2ofork
```
- PCL 1.8
```sh
wget -c https://github.com/PointCloudLibrary/pcl/archive/pcl-1.8.0.tar.gz
```
I am not sure why the default PCL 1.7 not working in docker image when compile RGBD SLAMv2.
- Compile RGBD SLAMv2
The compile process is writen in "docker/entrypoint.sh":
```sh
cd /root/catkin_ws
rosdep install -y rgbdslam --skip-keys="nvidia-cuda-dev nvidia-cuda"
catkin_make -j2
source "/root/catkin_ws/devel/setup.bash"
```
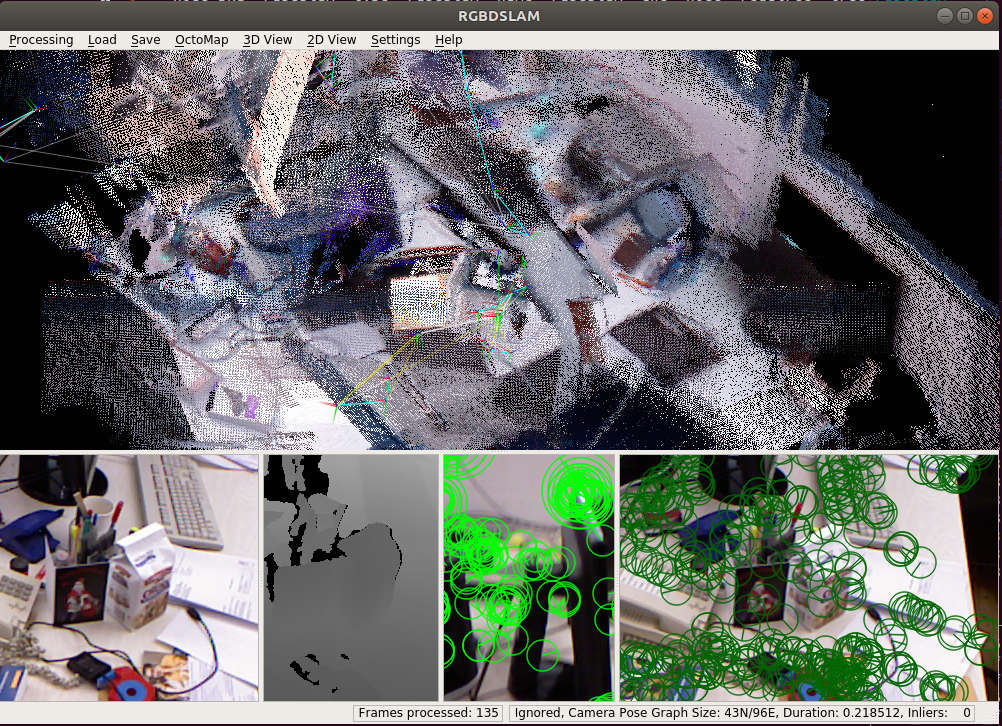
# Evaluate RGBD SALMv2 use TUM dataset
- Get TUM dataset
```sh
wget -c https://vision.in.tum.de/rgbd/dataset/freiburg1/rgbd_dataset_freiburg1_room.bag
```
- Start RGBD SLAM2
```sh
roslaunch rgbdslam rgbdslam.launch
or
roslaunch rgbdslam tum.launch (in my GitHub dev branch)
```
Make sure the image topic is like:
```sh
```
- Play TMU dataset
```sh
rosbag play *.bag
```
- Result
# Run test_settings.launch
- Modify test_settings.launch:
```sh
# Run test_settings.launch
- Modify test_settings.launch:
```sh




No comments