
 # Build Project
- Install Dependences
```sh
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
```
- Install OPenCV3: https://docs.opencv.org/3.1.0/d7/d9f/tutorial_linux_install.html
```sh
git clone https://github.com/opencv/opencv.git
git chekcout 3.3.1
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
make -j3
make install
```
- Install Eigen3
```sh
sudo apt install libeigen3-dev
```
- Install Pangolin
```sh
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j 3
make install
```
- Build ORB SLAM3
```sh
./build.sh
```
# Get EuRoc Dataset
```sh
wget -c http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/machine_hall/MH_01_easy/MH_01_easy.zip
```
Unzip to **MH01** folder.
# Run sample
Replace **pathDatasetEuroc** to you dataset path containing **MH01**.
**mono_euroc**:
```sh
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt dataset-MH01_mono
```
**mono_inertial_euroc**:
```sh
./Examples/Monocular-Inertial/mono_inertial_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular-Inertial/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Examples/Monocular-Inertial/EuRoC_TimeStamps/MH01.txt dataset-MH01_monoi
```
# Run MONO, Stereo and RGB-D without IMU
Cannot run Mono, Stereo, RGBD without IMU?
errors: ORB-SLAM3 seems not work well with an RGB-D mode
```sh
ORB Extractor Parameters:
Number of Features: 1000
Scale Levels: 8
Scale Factor: 1.2
Initial Fast Threshold: 20
Minimum Fast Threshold: 7
Depth Threshold (Close/Far Points): 3.07156
```
Refer issues:
1. https://github.com/UZ-SLAMLab/ORB_SLAM3/issues/8
1. https://github.com/UZ-SLAMLab/ORB_SLAM3/issues/3
Solution:
Refer:
1. [fix mono&stereo&RGB_D mode on Kitti&TUM RGBD](https://github.com/DreamWaterFound/ORB_SLAM3/commit/e8c3395915af5e733df6a909c0d70ebdfc7a0559)
1. [update kittiXX.yaml](https://github.com/DreamWaterFound/ORB_SLAM3/commit/5a07ca06212a3d49fb1a77893b001d48f22aabf9)
## How to modify?
Add this to **yaml** for MONO/RGBD mode of TUM and KITI Dataset:
```sh
Camera.type: "PinHole"
```
Stereo mode:
Examples/Stereo/KITTI00-02.yaml:
```sh
Camera.type: "PinHole"
# Opencv format
LEFT.height: 1241
LEFT.width: 376
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [718.856, 0.0, 607.1928, 0.0, 718.856, 185.2157, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.188560000000e+02, 0.000000000000e+00, 6.071928000000e+02, 0.000000000000e+00, 0.000000000000e+00, 7.188560000000e+02, 1.852157000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
RIGHT.height: 1241
RIGHT.width: 376
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [718.856, 0.0, 607.1928, 0.0, 718.856, 185.2157, 0.0, 0.0, 1.0]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.188560000000e+02, 0.000000000000e+00, 6.071928000000e+02, -3.861448000000e+02, 0.000000000000e+00, 7.188560000000e+02, 1.852157000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
```
Examples/Stereo/KITTI03.yaml:
```sh
Camera.type: "PinHole"
# Opencv format
LEFT.height: 1241
LEFT.width: 376
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [721.5377, 0.0, 609.5593, 0.0, 721.5377, 172.854, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.215377000000e+02, 0.000000000000e+00, 6.095593000000e+02, 0.000000000000e+00, 0.000000000000e+00, 7.215377000000e+02, 1.728540000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
RIGHT.height: 1241
RIGHT.width: 376
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [721.5377, 0.0, 609.5593, 0.0, 721.5377, 172.854, 0.0, 0.0, 1.0]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.215377000000e+02, 0.000000000000e+00, 6.095593000000e+02, -3.875744000000e+02, 0.000000000000e+00, 7.215377000000e+02, 1.728540000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
```
Examples/Stereo/KITTI04-12.yaml:
```sh
Camera.type: "PinHole"
# Opencv format
LEFT.height: 1241
LEFT.width: 376
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [707.0912, 0.0, 601.8873, 0.0, 707.0912, 183.1104, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.070912000000e+02, 0.000000000000e+00, 6.018873000000e+02, 0.000000000000e+00, 0.000000000000e+00, 7.070912000000e+02, 1.831104000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
RIGHT.height: 1241
RIGHT.width: 376
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [707.0912, 0.0, 601.8873, 0.0, 707.0912, 183.1104, 0.0, 0.0, 1.0]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.070912000000e+02, 0.000000000000e+00, 6.018873000000e+02, -3.798145000000e+02, 0.000000000000e+00, 7.070912000000e+02, 1.831104000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
```
include/Frame.h:
```cpp
// Constructor for RGB-D cameras.
-Frame(const cv::Mat &imGray, const cv::Mat &imDepth, const double &timeStamp, ORBextractor* extractor,ORBVocabulary* voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth, Frame* pPrevF = static_cast
# Build Project
- Install Dependences
```sh
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
```
- Install OPenCV3: https://docs.opencv.org/3.1.0/d7/d9f/tutorial_linux_install.html
```sh
git clone https://github.com/opencv/opencv.git
git chekcout 3.3.1
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
make -j3
make install
```
- Install Eigen3
```sh
sudo apt install libeigen3-dev
```
- Install Pangolin
```sh
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j 3
make install
```
- Build ORB SLAM3
```sh
./build.sh
```
# Get EuRoc Dataset
```sh
wget -c http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/machine_hall/MH_01_easy/MH_01_easy.zip
```
Unzip to **MH01** folder.
# Run sample
Replace **pathDatasetEuroc** to you dataset path containing **MH01**.
**mono_euroc**:
```sh
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt dataset-MH01_mono
```
**mono_inertial_euroc**:
```sh
./Examples/Monocular-Inertial/mono_inertial_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular-Inertial/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Examples/Monocular-Inertial/EuRoC_TimeStamps/MH01.txt dataset-MH01_monoi
```
# Run MONO, Stereo and RGB-D without IMU
Cannot run Mono, Stereo, RGBD without IMU?
errors: ORB-SLAM3 seems not work well with an RGB-D mode
```sh
ORB Extractor Parameters:
Number of Features: 1000
Scale Levels: 8
Scale Factor: 1.2
Initial Fast Threshold: 20
Minimum Fast Threshold: 7
Depth Threshold (Close/Far Points): 3.07156
```
Refer issues:
1. https://github.com/UZ-SLAMLab/ORB_SLAM3/issues/8
1. https://github.com/UZ-SLAMLab/ORB_SLAM3/issues/3
Solution:
Refer:
1. [fix mono&stereo&RGB_D mode on Kitti&TUM RGBD](https://github.com/DreamWaterFound/ORB_SLAM3/commit/e8c3395915af5e733df6a909c0d70ebdfc7a0559)
1. [update kittiXX.yaml](https://github.com/DreamWaterFound/ORB_SLAM3/commit/5a07ca06212a3d49fb1a77893b001d48f22aabf9)
## How to modify?
Add this to **yaml** for MONO/RGBD mode of TUM and KITI Dataset:
```sh
Camera.type: "PinHole"
```
Stereo mode:
Examples/Stereo/KITTI00-02.yaml:
```sh
Camera.type: "PinHole"
# Opencv format
LEFT.height: 1241
LEFT.width: 376
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [718.856, 0.0, 607.1928, 0.0, 718.856, 185.2157, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.188560000000e+02, 0.000000000000e+00, 6.071928000000e+02, 0.000000000000e+00, 0.000000000000e+00, 7.188560000000e+02, 1.852157000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
RIGHT.height: 1241
RIGHT.width: 376
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [718.856, 0.0, 607.1928, 0.0, 718.856, 185.2157, 0.0, 0.0, 1.0]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.188560000000e+02, 0.000000000000e+00, 6.071928000000e+02, -3.861448000000e+02, 0.000000000000e+00, 7.188560000000e+02, 1.852157000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
```
Examples/Stereo/KITTI03.yaml:
```sh
Camera.type: "PinHole"
# Opencv format
LEFT.height: 1241
LEFT.width: 376
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [721.5377, 0.0, 609.5593, 0.0, 721.5377, 172.854, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.215377000000e+02, 0.000000000000e+00, 6.095593000000e+02, 0.000000000000e+00, 0.000000000000e+00, 7.215377000000e+02, 1.728540000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
RIGHT.height: 1241
RIGHT.width: 376
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [721.5377, 0.0, 609.5593, 0.0, 721.5377, 172.854, 0.0, 0.0, 1.0]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.215377000000e+02, 0.000000000000e+00, 6.095593000000e+02, -3.875744000000e+02, 0.000000000000e+00, 7.215377000000e+02, 1.728540000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
```
Examples/Stereo/KITTI04-12.yaml:
```sh
Camera.type: "PinHole"
# Opencv format
LEFT.height: 1241
LEFT.width: 376
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [707.0912, 0.0, 601.8873, 0.0, 707.0912, 183.1104, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.070912000000e+02, 0.000000000000e+00, 6.018873000000e+02, 0.000000000000e+00, 0.000000000000e+00, 7.070912000000e+02, 1.831104000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
RIGHT.height: 1241
RIGHT.width: 376
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [707.0912, 0.0, 601.8873, 0.0, 707.0912, 183.1104, 0.0, 0.0, 1.0]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.070912000000e+02, 0.000000000000e+00, 6.018873000000e+02, -3.798145000000e+02, 0.000000000000e+00, 7.070912000000e+02, 1.831104000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
```
include/Frame.h:
```cpp
// Constructor for RGB-D cameras.
-Frame(const cv::Mat &imGray, const cv::Mat &imDepth, const double &timeStamp, ORBextractor* extractor,ORBVocabulary* voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth, Frame* pPrevF = static_castHow to compile and run ORB-SLAM3? [ORB-SLAM3 运行示例]
# Resources
- Official Github: https://github.com/UZ-SLAMLab/ORB_SLAM3
- My clone version: https://github.com/yubaoliu/ORB_SLAM3
- Youtube demo: https://youtu.be/WfY6mCTnFGg
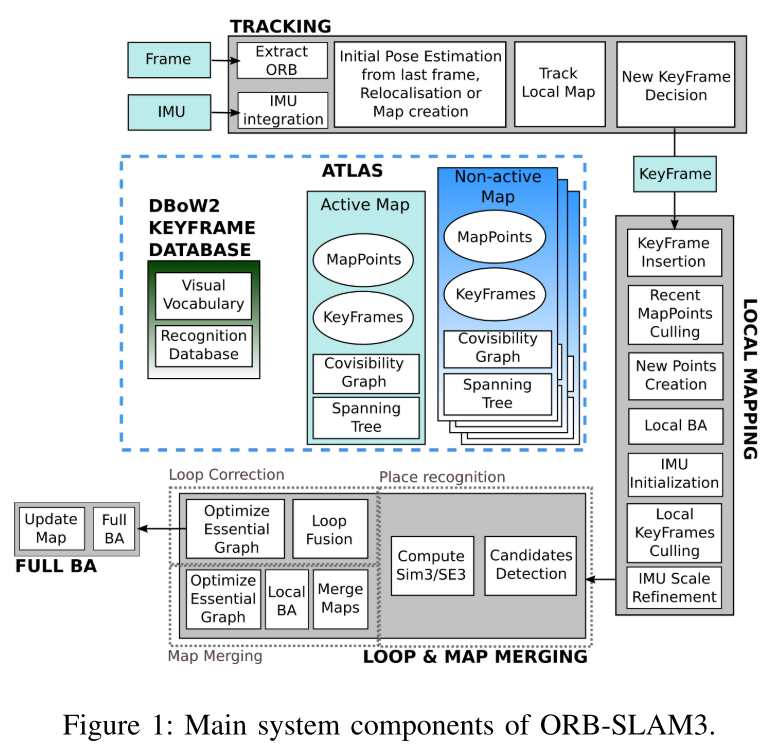
ORB-SLAM3 is the first real-time SLAM library able to perform Visual, Visual-Inertial and Multi-Map SLAM with monocular, stereo and RGB-D cameras, using pin-hole and fisheye lens models. In all sensor configurations, ORB-SLAM3 is as robust as the best systems available in the literature, and significantly more accurate.
# Build Project
- Install Dependences
```sh
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
```
- Install OPenCV3: https://docs.opencv.org/3.1.0/d7/d9f/tutorial_linux_install.html
```sh
git clone https://github.com/opencv/opencv.git
git chekcout 3.3.1
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
make -j3
make install
```
- Install Eigen3
```sh
sudo apt install libeigen3-dev
```
- Install Pangolin
```sh
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j 3
make install
```
- Build ORB SLAM3
```sh
./build.sh
```
# Get EuRoc Dataset
```sh
wget -c http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/machine_hall/MH_01_easy/MH_01_easy.zip
```
Unzip to **MH01** folder.
# Run sample
Replace **pathDatasetEuroc** to you dataset path containing **MH01**.
**mono_euroc**:
```sh
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt dataset-MH01_mono
```
**mono_inertial_euroc**:
```sh
./Examples/Monocular-Inertial/mono_inertial_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular-Inertial/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Examples/Monocular-Inertial/EuRoC_TimeStamps/MH01.txt dataset-MH01_monoi
```
# Run MONO, Stereo and RGB-D without IMU
Cannot run Mono, Stereo, RGBD without IMU?
errors: ORB-SLAM3 seems not work well with an RGB-D mode
```sh
ORB Extractor Parameters:
Number of Features: 1000
Scale Levels: 8
Scale Factor: 1.2
Initial Fast Threshold: 20
Minimum Fast Threshold: 7
Depth Threshold (Close/Far Points): 3.07156
```
Refer issues:
1. https://github.com/UZ-SLAMLab/ORB_SLAM3/issues/8
1. https://github.com/UZ-SLAMLab/ORB_SLAM3/issues/3
Solution:
Refer:
1. [fix mono&stereo&RGB_D mode on Kitti&TUM RGBD](https://github.com/DreamWaterFound/ORB_SLAM3/commit/e8c3395915af5e733df6a909c0d70ebdfc7a0559)
1. [update kittiXX.yaml](https://github.com/DreamWaterFound/ORB_SLAM3/commit/5a07ca06212a3d49fb1a77893b001d48f22aabf9)
## How to modify?
Add this to **yaml** for MONO/RGBD mode of TUM and KITI Dataset:
```sh
Camera.type: "PinHole"
```
Stereo mode:
Examples/Stereo/KITTI00-02.yaml:
```sh
Camera.type: "PinHole"
# Opencv format
LEFT.height: 1241
LEFT.width: 376
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [718.856, 0.0, 607.1928, 0.0, 718.856, 185.2157, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.188560000000e+02, 0.000000000000e+00, 6.071928000000e+02, 0.000000000000e+00, 0.000000000000e+00, 7.188560000000e+02, 1.852157000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
RIGHT.height: 1241
RIGHT.width: 376
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [718.856, 0.0, 607.1928, 0.0, 718.856, 185.2157, 0.0, 0.0, 1.0]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.188560000000e+02, 0.000000000000e+00, 6.071928000000e+02, -3.861448000000e+02, 0.000000000000e+00, 7.188560000000e+02, 1.852157000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
```
Examples/Stereo/KITTI03.yaml:
```sh
Camera.type: "PinHole"
# Opencv format
LEFT.height: 1241
LEFT.width: 376
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [721.5377, 0.0, 609.5593, 0.0, 721.5377, 172.854, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.215377000000e+02, 0.000000000000e+00, 6.095593000000e+02, 0.000000000000e+00, 0.000000000000e+00, 7.215377000000e+02, 1.728540000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
RIGHT.height: 1241
RIGHT.width: 376
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [721.5377, 0.0, 609.5593, 0.0, 721.5377, 172.854, 0.0, 0.0, 1.0]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.215377000000e+02, 0.000000000000e+00, 6.095593000000e+02, -3.875744000000e+02, 0.000000000000e+00, 7.215377000000e+02, 1.728540000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
```
Examples/Stereo/KITTI04-12.yaml:
```sh
Camera.type: "PinHole"
# Opencv format
LEFT.height: 1241
LEFT.width: 376
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [707.0912, 0.0, 601.8873, 0.0, 707.0912, 183.1104, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.070912000000e+02, 0.000000000000e+00, 6.018873000000e+02, 0.000000000000e+00, 0.000000000000e+00, 7.070912000000e+02, 1.831104000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
RIGHT.height: 1241
RIGHT.width: 376
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [707.0912, 0.0, 601.8873, 0.0, 707.0912, 183.1104, 0.0, 0.0, 1.0]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.070912000000e+02, 0.000000000000e+00, 6.018873000000e+02, -3.798145000000e+02, 0.000000000000e+00, 7.070912000000e+02, 1.831104000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
```
include/Frame.h:
```cpp
// Constructor for RGB-D cameras.
-Frame(const cv::Mat &imGray, const cv::Mat &imDepth, const double &timeStamp, ORBextractor* extractor,ORBVocabulary* voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth, Frame* pPrevF = static_cast(NULL), const IMU::Calib &ImuCalib = IMU::Calib());
+Frame(const cv::Mat &imGray, const cv::Mat &imDepth, const double &timeStamp, ORBextractor* extractor,ORBVocabulary* voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth, GeometricCamera* pCamera, Frame* pPrevF = static_cast(NULL), const IMU::Calib &ImuCalib = IMU::Calib());
```
src/Frame.cc:
```cpp
-Frame::Frame(const cv::Mat &imGray, const cv::Mat &imDepth, const double &timeStamp, ORBextractor* extractor,ORBVocabulary* voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth, Frame* pPrevF, const IMU::Calib &ImuCalib)
+Frame::Frame(const cv::Mat &imGray, const cv::Mat &imDepth, const double &timeStamp, ORBextractor* extractor,ORBVocabulary* voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth, GeometricCamera* pCamera, Frame* pPrevF, const IMU::Calib &ImuCalib)
:mpcpi(NULL),mpORBvocabulary(voc),mpORBextractorLeft(extractor),mpORBextractorRight(static_cast(NULL)),
mTimeStamp(timeStamp), mK(K.clone()),mDistCoef(distCoef.clone()), mbf(bf), mThDepth(thDepth),
mImuCalib(ImuCalib), mpImuPreintegrated(NULL), mpPrevFrame(pPrevF), mpImuPreintegratedFrame(NULL), mpReferenceKF(static_cast(NULL)), mbImuPreintegrated(false),
mpCamera2(nullptr), mTimeStereoMatch(0), mTimeORB_Ext(0)
mpCamera(pCamera), mpCamera2(nullptr), mTimeStereoMatch(0), mTimeORB_Ext(0)
```
src/Tracking.cc:
```cpp
- mCurrentFrame = Frame(mImGray,imDepth,timestamp,mpORBextractorLeft,mpORBVocabulary,mK,mDistCoef,mbf,mThDepth);
+ mCurrentFrame = Frame(mImGray,imDepth,timestamp,mpORBextractorLeft,mpORBVocabulary,mK,mDistCoef,mbf,mThDepth, mpCamera);
```
---
# Possible Errors
## GeometricCamera.h
Issue:
When run ./build_ros.sh
```sh
#include "GeometricCamera.h" not found
```
Solution:
Add ``${PROJECT_SOURCE_DIR}/../../../include/CameraModels`` to CMakeLists.txt:
```sh
include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/../../../
${PROJECT_SOURCE_DIR}/../../../include
${PROJECT_SOURCE_DIR}/../../../include/CameraModels
${Pangolin_INCLUDE_DIRS}
)
```
---
When run ./build_ros.sh
```sh
ros_stereo.cc:40:18: error: 'ORB_SLAM2' has not been declared
ImageGrabber(ORB_SLAM2::System* pSLAM):mpSLAM(pSLAM){}
^~~~~~~~~
/root/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/ros_stereo.cc:40:35: error: expected ')' before '*' token
ImageGrabber(ORB_SLAM2::System* pSLAM):mpSLAM(pSLAM){}
^
/root/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/ros_stereo.cc:44:5: error: 'ORB_SLAM2' does not name a type
ORB_SLAM2::System* mpSLAM;
^~~~~~~~~
/root/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/ros_stereo.cc: In function 'int main(int, char**)':
/root/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/ros_stereo.cc:62:5: error: 'ORB_SLAM2' has not been declared
ORB_SLAM2::System SLAM(argv[1],argv[2],ORB_SLAM2::System::STEREO,true);
^~~~~~~~~
/root/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/ros_stereo.cc:64:23: error: 'SLAM' was not declared in this scope
ImageGrabber igb(&SLAM);
^~~~
/root/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/ros_stereo.cc:64:23: note: suggested alternative: 'SNAN'
ImageGrabber igb(&SLAM);
^~~~
SNAN
/root/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/ros_rgbd.cc:40:18: error: 'ORB_SLAM2' has not been declared
ImageGrabber(ORB_SLAM2::System* pSLAM):mpSLAM(pSLAM){}
^~~~~~~~~
/root/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/ros_rgbd.cc:40:35: error: expected ')' before '*' token
ImageGrabber(ORB_SLAM2::System* pSLAM):mpSLAM(pSLAM){}
^
/root/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/ros_rgbd.cc:44:5: error: 'ORB_SLAM2' does not name a type
ORB_SLAM2::System* mpSLAM;
^~~~~~~~~
/root/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/ros_rgbd.cc: In function 'int main(int, char**)':
/root/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/ros_rgbd.cc:60:5: error: 'ORB_SLAM2' has not been declared
ORB_SLAM2::System SLAM(argv[1],argv[2],ORB_SLAM2::System::RGBD,true);
```
It seems the ROS version has not yet compeleted. (Maybe)
Solution:
- change **ORB_SLAM2** to **ORB_SLAM3** for all the src files under Example/ROS
## undefined reference to symbol
When build ROS wrapper:
```sh
[ 44%] Linking CXX executable ../Stereo
/usr/bin/ld: CMakeFiles/RGBD.dir/src/ros_rgbd.cc.o: undefined reference to symbol '_ZN5boost6system15system_categoryEv'
/usr/lib/x86_64-linux-gnu/libboost_system.so: error adding symbols: DSO missing from command line
collect2: error: ld returned 1 exit status
CMakeFiles/RGBD.dir/build.make:227: recipe for target '../RGBD' failed
make[2]: *** [../RGBD] Error 1
CMakeFiles/Makefile2:67: recipe for target 'CMakeFiles/RGBD.dir/all' failed
make[1]: *** [CMakeFiles/RGBD.dir/all] Error 2
make[1]: *** Waiting for unfinished jobs....
/usr/bin/ld: CMakeFiles/Stereo.dir/src/ros_stereo.cc.o: undefined reference to symbol '_ZN5boost6system15system_categoryEv'
/usr/lib/x86_64-linux-gnu/libboost_system.so: error adding symbols: DSO missing from command line
collect2: error: ld returned 1 exit status
CMakeFiles/Stereo.dir/build.make:227: recipe for target '../Stereo' failed
make[2]: *** [../Stereo] Error 1
CMakeFiles/Makefile2:104: recipe for target 'CMakeFiles/Stereo.dir/all' failed
make[1]: *** [CMakeFiles/Stereo.dir/all] Error 2
Makefile:129: recipe for target 'all' failed
make: *** [all] Error 2
```
Solution:
Config Boost library:
```sh
find_package(Boost REQUIRED COMPONENTS system)
${Boost_INCLUDE_DIRS}$
${Boost_LIBRARIES}
```
Refer: https://cmake.org/cmake/help/v3.15/module/FindBoost.html
# References
- Forster, C., Carlone, L., Dellaert, F., & Scaramuzza, D. (n.d.). On-Manifold Preintegration for Real-Time Visual-Inertial Odometry. Retrieved September 5, 2019, from https://youtu.be/CsJkci5lfco
- Elvira, R., Tardós, J. D., & Montiel, J. M. M. (2019). ORBSLAM-Atlas: a robust and accurate multi-map system.
- Campos, C., Elvira, R., Rodríguez, J. J. G., Montiel, J. M. M., & Tardós, J. D. (2020). ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM. http://arxiv.org/abs/2007.11898
# Build Project
- Install Dependences
```sh
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
```
- Install OPenCV3: https://docs.opencv.org/3.1.0/d7/d9f/tutorial_linux_install.html
```sh
git clone https://github.com/opencv/opencv.git
git chekcout 3.3.1
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
make -j3
make install
```
- Install Eigen3
```sh
sudo apt install libeigen3-dev
```
- Install Pangolin
```sh
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j 3
make install
```
- Build ORB SLAM3
```sh
./build.sh
```
# Get EuRoc Dataset
```sh
wget -c http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/machine_hall/MH_01_easy/MH_01_easy.zip
```
Unzip to **MH01** folder.
# Run sample
Replace **pathDatasetEuroc** to you dataset path containing **MH01**.
**mono_euroc**:
```sh
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt dataset-MH01_mono
```
**mono_inertial_euroc**:
```sh
./Examples/Monocular-Inertial/mono_inertial_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular-Inertial/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Examples/Monocular-Inertial/EuRoC_TimeStamps/MH01.txt dataset-MH01_monoi
```
# Run MONO, Stereo and RGB-D without IMU
Cannot run Mono, Stereo, RGBD without IMU?
errors: ORB-SLAM3 seems not work well with an RGB-D mode
```sh
ORB Extractor Parameters:
Number of Features: 1000
Scale Levels: 8
Scale Factor: 1.2
Initial Fast Threshold: 20
Minimum Fast Threshold: 7
Depth Threshold (Close/Far Points): 3.07156
```
Refer issues:
1. https://github.com/UZ-SLAMLab/ORB_SLAM3/issues/8
1. https://github.com/UZ-SLAMLab/ORB_SLAM3/issues/3
Solution:
Refer:
1. [fix mono&stereo&RGB_D mode on Kitti&TUM RGBD](https://github.com/DreamWaterFound/ORB_SLAM3/commit/e8c3395915af5e733df6a909c0d70ebdfc7a0559)
1. [update kittiXX.yaml](https://github.com/DreamWaterFound/ORB_SLAM3/commit/5a07ca06212a3d49fb1a77893b001d48f22aabf9)
## How to modify?
Add this to **yaml** for MONO/RGBD mode of TUM and KITI Dataset:
```sh
Camera.type: "PinHole"
```
Stereo mode:
Examples/Stereo/KITTI00-02.yaml:
```sh
Camera.type: "PinHole"
# Opencv format
LEFT.height: 1241
LEFT.width: 376
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [718.856, 0.0, 607.1928, 0.0, 718.856, 185.2157, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.188560000000e+02, 0.000000000000e+00, 6.071928000000e+02, 0.000000000000e+00, 0.000000000000e+00, 7.188560000000e+02, 1.852157000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
RIGHT.height: 1241
RIGHT.width: 376
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [718.856, 0.0, 607.1928, 0.0, 718.856, 185.2157, 0.0, 0.0, 1.0]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.188560000000e+02, 0.000000000000e+00, 6.071928000000e+02, -3.861448000000e+02, 0.000000000000e+00, 7.188560000000e+02, 1.852157000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
```
Examples/Stereo/KITTI03.yaml:
```sh
Camera.type: "PinHole"
# Opencv format
LEFT.height: 1241
LEFT.width: 376
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [721.5377, 0.0, 609.5593, 0.0, 721.5377, 172.854, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.215377000000e+02, 0.000000000000e+00, 6.095593000000e+02, 0.000000000000e+00, 0.000000000000e+00, 7.215377000000e+02, 1.728540000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
RIGHT.height: 1241
RIGHT.width: 376
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [721.5377, 0.0, 609.5593, 0.0, 721.5377, 172.854, 0.0, 0.0, 1.0]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.215377000000e+02, 0.000000000000e+00, 6.095593000000e+02, -3.875744000000e+02, 0.000000000000e+00, 7.215377000000e+02, 1.728540000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
```
Examples/Stereo/KITTI04-12.yaml:
```sh
Camera.type: "PinHole"
# Opencv format
LEFT.height: 1241
LEFT.width: 376
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [707.0912, 0.0, 601.8873, 0.0, 707.0912, 183.1104, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.070912000000e+02, 0.000000000000e+00, 6.018873000000e+02, 0.000000000000e+00, 0.000000000000e+00, 7.070912000000e+02, 1.831104000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
RIGHT.height: 1241
RIGHT.width: 376
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [0.0, 0.0, 0.0, 0.0, 0.0]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [707.0912, 0.0, 601.8873, 0.0, 707.0912, 183.1104, 0.0, 0.0, 1.0]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [7.070912000000e+02, 0.000000000000e+00, 6.018873000000e+02, -3.798145000000e+02, 0.000000000000e+00, 7.070912000000e+02, 1.831104000000e+02, 0.000000000000e+00, 0.000000000000e+00, 0.000000000000e+00, 1.000000000000e+00, 0.000000000000e+00]
```
include/Frame.h:
```cpp
// Constructor for RGB-D cameras.
-Frame(const cv::Mat &imGray, const cv::Mat &imDepth, const double &timeStamp, ORBextractor* extractor,ORBVocabulary* voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth, Frame* pPrevF = static_cast



No comments