
SLAM++: Simultaneous Localisation and Mapping at the Level of Objecs [Reading Seminar]
## 论文介绍
论文标题: SLAM++: Simultaneous Localisation and Mapping at the Level of Objecs
对象级别SLAM(SLAM++)
作者: Renato F. Salas-Moreno, Richard A. Newcombe, Hauke Strasdat, Paul H.J. Kelly, **Andrew J. Davison**
出处:The IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2013, pp. 1352-1359[^SLAM++PaperLink]
在Youtube[^SlAM++DEMO]中有这篇文章的DEMO示例。
作者中 **Andrew J. Davison** 是大名鼎鼎的单目SLAM的作者,MonoSLAM: Real-Time Single Camera SLAM[^MonoSLAM]。他现在是Professor, Department of Computing, Imperial College London, 研究方向是vision and AI technology for next generation home robotics.
Currently his main research interests are in improving the performance in terms of **dynamics, scale, detail level, efficiency and semantic understanding of real-time 3D vision**.[^AndrewDavison]
He believes that SLAM is evolving into something even more important that I am calling "**Spatial AI**"(Refer:[**FutureMapping: The Computational Structure of Spatial AI Systems**](https://arxiv.org/pdf/1803.11288.pdf)) [^AndrewDavison]
**摘要**:本文提出了一个纯面向对象级别的SLAM系统(A Pure Oboject-Level SLAM System)。描述了一个实时递增的SLAM(real time incremental SLAM)。它具有如下特点:
- 适用于大规模复杂环境,场景中包含重复、预先设定的物体与结构
- 可以进行重定位与回环检测
- 检测运动的物体
- 生成对象级别的场景描述
- 增加了交互的可能性
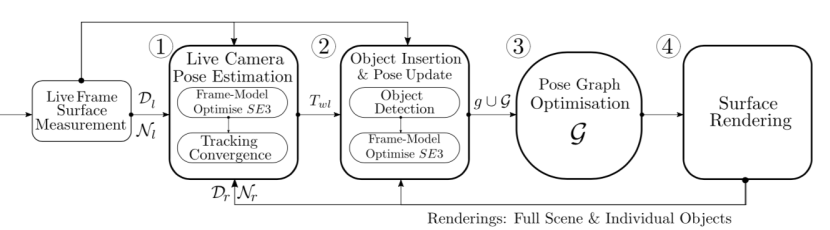
系统架构:
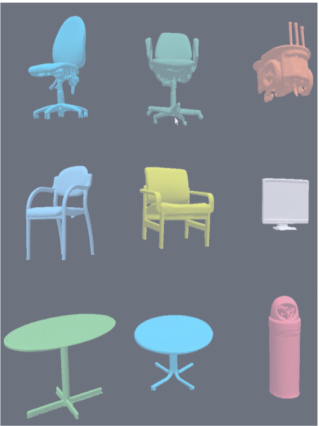
预定义目标物体数据库:
实时目标检测:
本文使用**Model Globally, Match Locally’, Drost et al., CVPR 2010**中的算法进行事实目标检测。
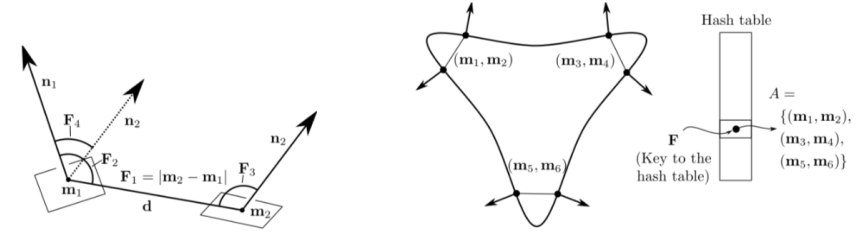
$F$: PPF of two oriented points
$F_1$: the distance of the points
$F_2$: the angle between the normals and $F_1$
$F_4$: the angle between the two normals
图优化:
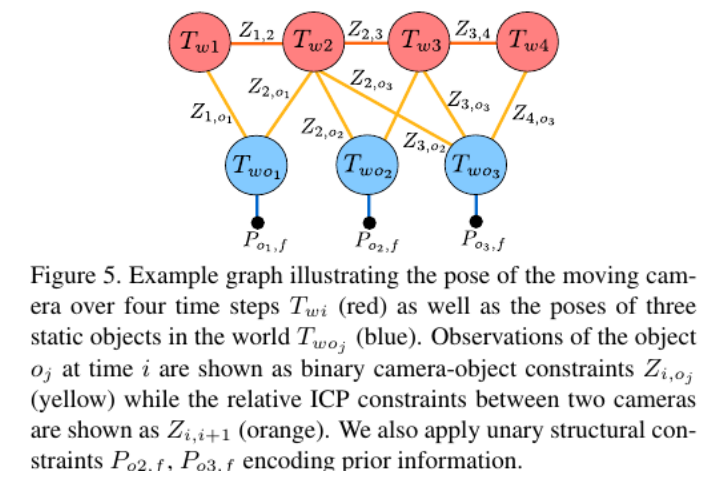
- $T_{woj}$: $SE(3)$ pose of object $j$
- $T_{wi}$: SE(3) pose of the historical pose of the camera at timestep $i$.
- $Z_{i,oj}$: constraints, which links one camera pose and one object pose
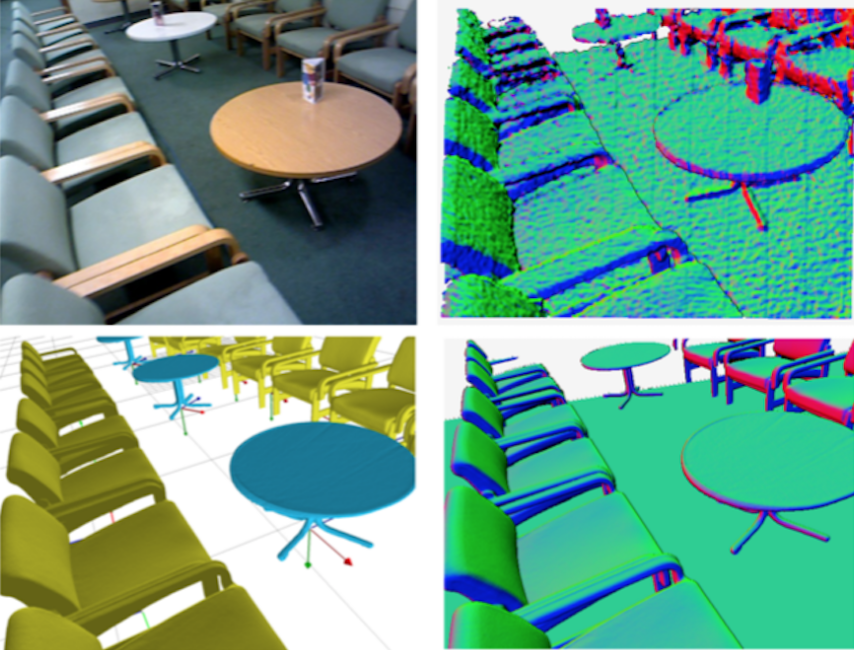
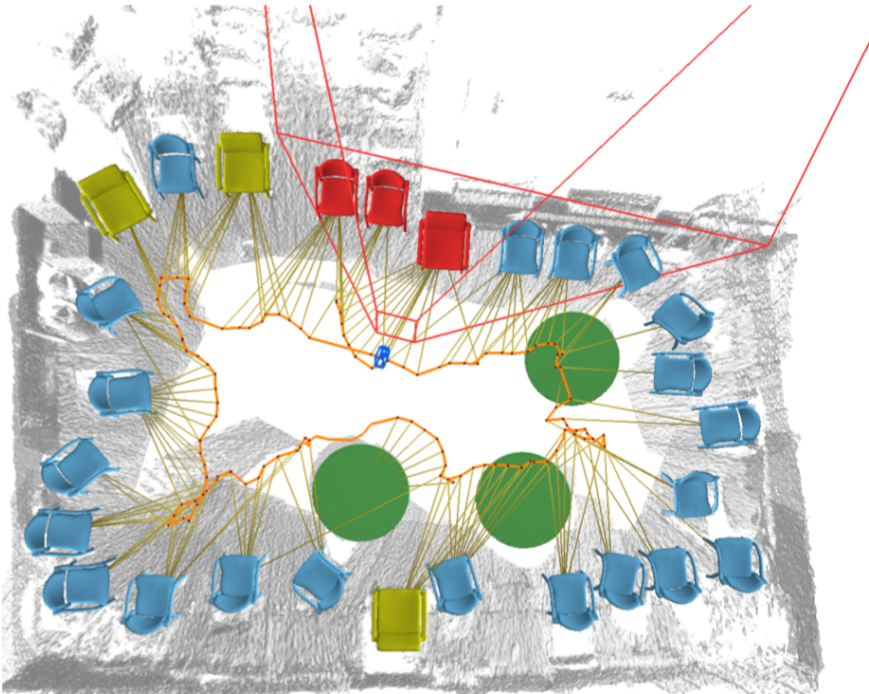
地图构建:
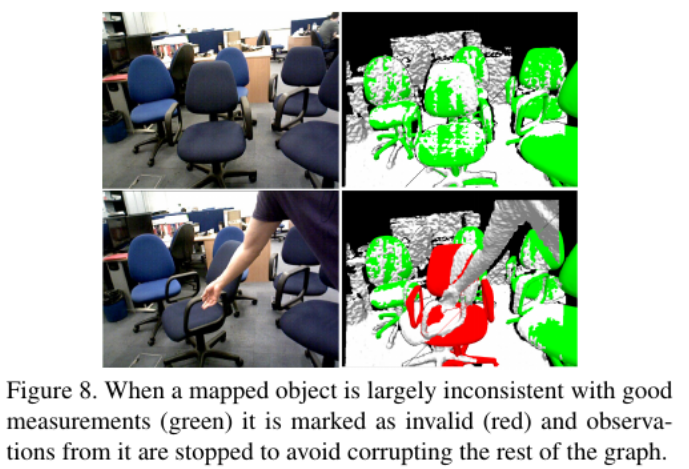
运动物体检测:
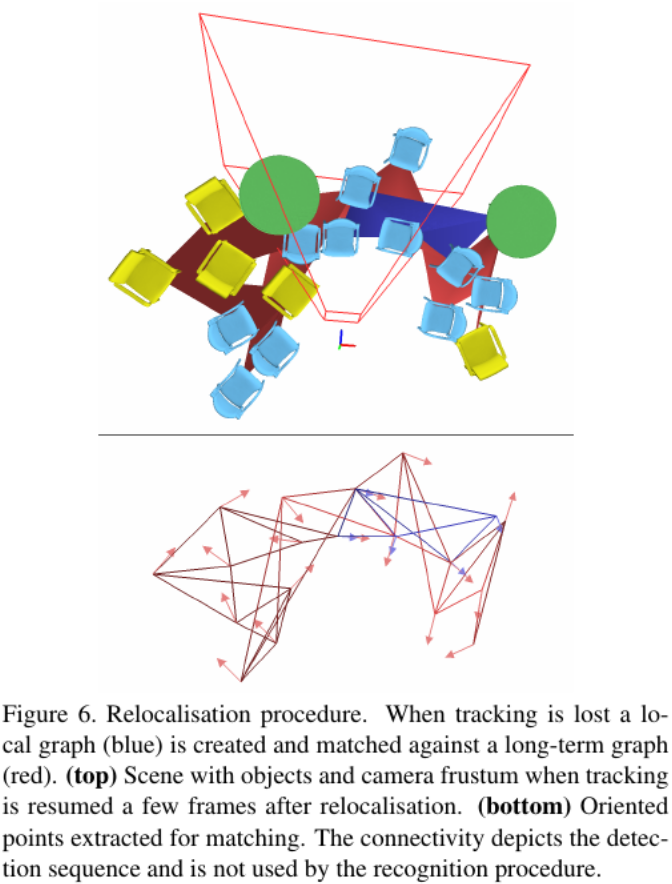
相机重定位:
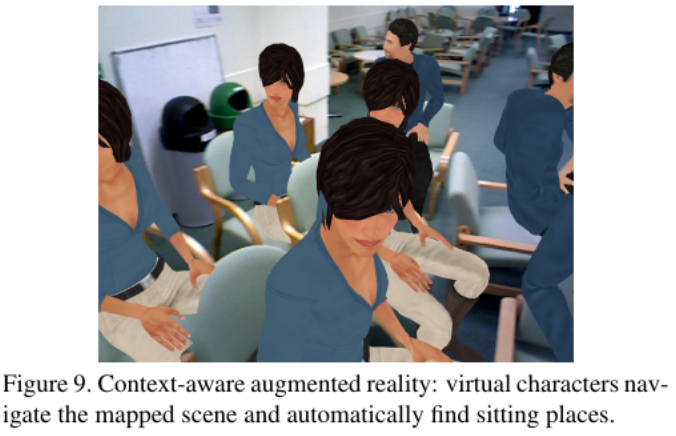
AR实验:
## Abstract
We present the major advantages of a new ‘object oriented’ 3D SLAM paradigm, which takes full advantage in the loop of prior knowledge that many scenes consist of repeated, domain-specific objects and structures. As a hand-held depth camera browses a cluttered scene, real time 3D object recognition and tracking provides 6DoF camera-object constraints which feed into an explicit graph of objects, continually refined by efficient pose-graph optimisation. This offers the descriptive and predictive power of SLAM systems which perform dense surface reconstruction, but with a huge representation compression. The object graph enables predictions for accurate ICP-based camera to model tracking at each live frame, and efficient active search for new objects in currently undescribed image regions. We demonstrate real-time incremental SLAM in large, cluttered environments, including loop closure, relocalisation and the detection of moved objects, and of course the generation of an object level scene description with the potential to enable interaction.
# Resources
- [My reading seminar PPT](https://drive.google.com/file/d/1VqyrckZSvPIzKzU2hGWTCdKiVlLL2Ofw/view?usp=sharing)
[^MonoSLAM]: https://scholar.google.com/scholar_url?url=https://spiral.imperial.ac.uk/bitstream/10044/1/695/1/MonoSLAM%2520Real-Time%2520Single%2520Camera%2520SLAM.pdf&hl=en&sa=T&oi=gsb-gga&ct=res&cd=0&d=5740995592443152637&ei=Za8pXIOmJ8S_yQTmu7boDw&scisig=AAGBfm0HjoEEfcPRlMNBL4p91T6uZsXtyw
[^AndrewDavison]: https://www.doc.ic.ac.uk/~ajd/
[^SlAM++DEMO]: https://www.youtube.com/watch?v=tmrAh1CqCRo&t=1s
[^SLAM++PaperLink]: https://www.doc.ic.ac.uk/~ajd/Publications/salas-moreno_etal_cvpr2013.pdf




No comments